TJA1057 All information provided in this document is subject to legal disclaimers. © NXP Semiconductors N.V. 2017. All rights reserved.
Product data sheet Rev. 6 — 24 August 2017 5 of 25
NXP Semiconductors
TJA1057
High-speed CAN transceiver
7. Functional description
7.1 Operating modes
The TJA1057 supports two operating modes, Normal and Silent. The operating mode is
selected via pin S. See Table 4
for a description of the operating modes under normal
supply conditions.
[1] ‘x’ = don’t care.
7.1.1 Normal mode
A LOW level on pin S selects Normal mode. In this mode, the transceiver can transmit and
receive data via the bus lines, CANH and CANL (see Figure 1
for the block diagram). The
differential receiver converts the analog data on the bus lines into digital data which is
output on pin RXD. The slopes of the output signals on the bus lines are controlled
internally and are optimized in a way that guarantees the lowest possible EME.
7.1.2 Silent mode
A HIGH level on pin S selects Silent mode. The transmitter is disabled in Silent mode,
releasing the bus pins to recessive state. All other IC functions, including the receiver,
continue to operate as in Normal mode. Silent mode can be used to prevent a faulty CAN
controller disrupting all network communications.
7.2 Fail-safe features
7.2.1 TXD dominant time-out function
A 'TXD dominant time-out' timer is started when pin TXD is set LOW. If the LOW state on
this pin persists for longer than t
to(dom)TXD
, the transmitter is disabled, releasing the bus
lines to recessive state. This function prevents a hardware and/or software application
failure from driving the bus lines to a permanent dominant state (blocking all network
communications). The TXD dominant time-out timer is reset when pin TXD is set HIGH.
The TXD dominant time-out time also defines the minimum possible bit rate of
approximately 25 kbit/s.
7.2.2 Internal biasing of TXD and S input pins
Pins TXD and S have internal pull-ups to V
CC
(or V
IO
in TJA1057GT(K)/3 variants) to
ensure a safe, defined state in case one or both of these pins are left floating. Pull-up
currents flow in these pins in all states; both pins should be held HIGH in Silent mode to
minimize supply current.
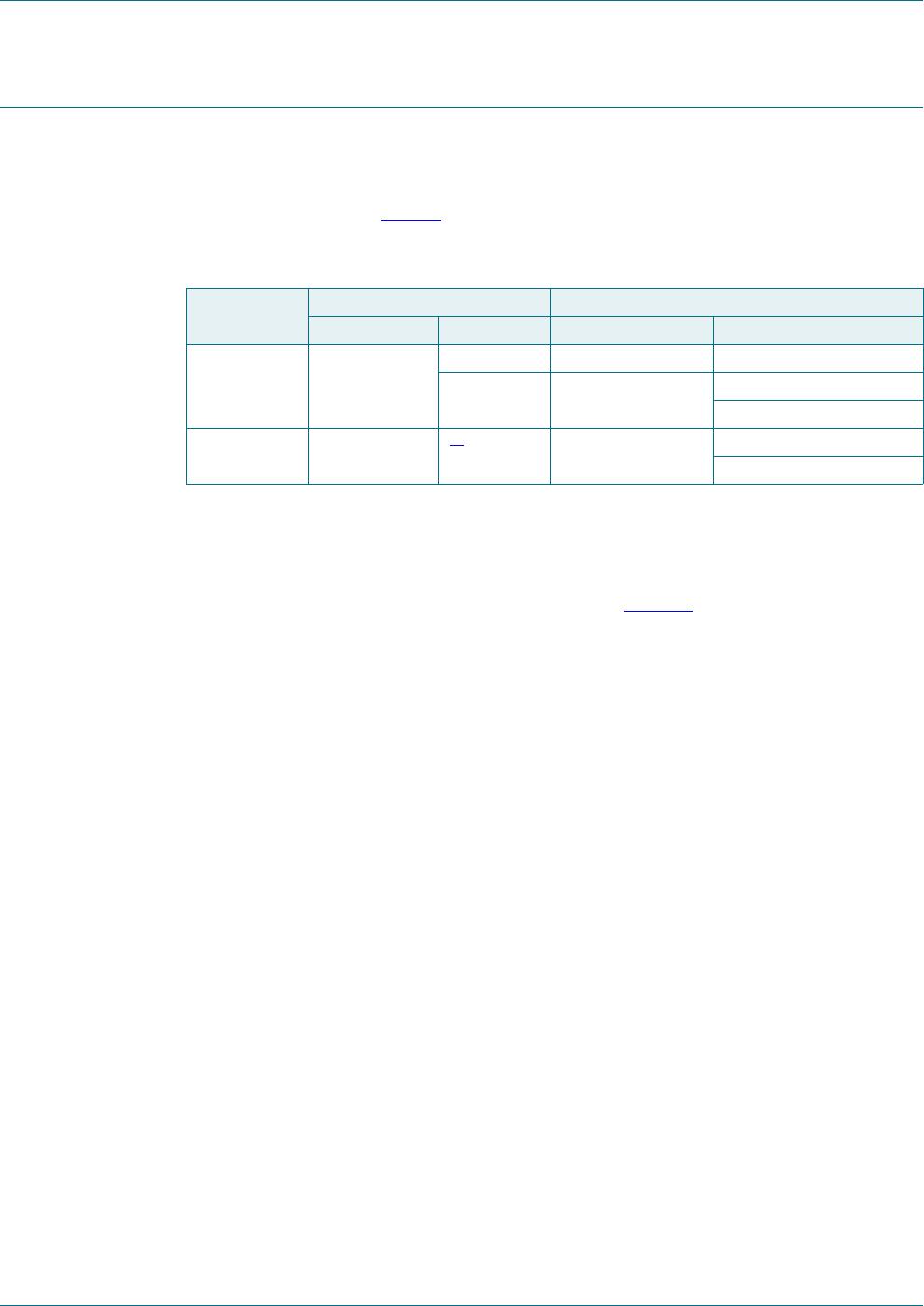
Table 4. Operating modes
Mode Inputs Outputs
Pin S Pin TXD CAN driver Pin RXD
Normal LOW LOW dominant LOW
HIGH recessive LOW when bus dominant
HIGH when bus recessive
Silent HIGH x
[1]
biased to recessive LOW when bus dominant
HIGH when bus recessive