15
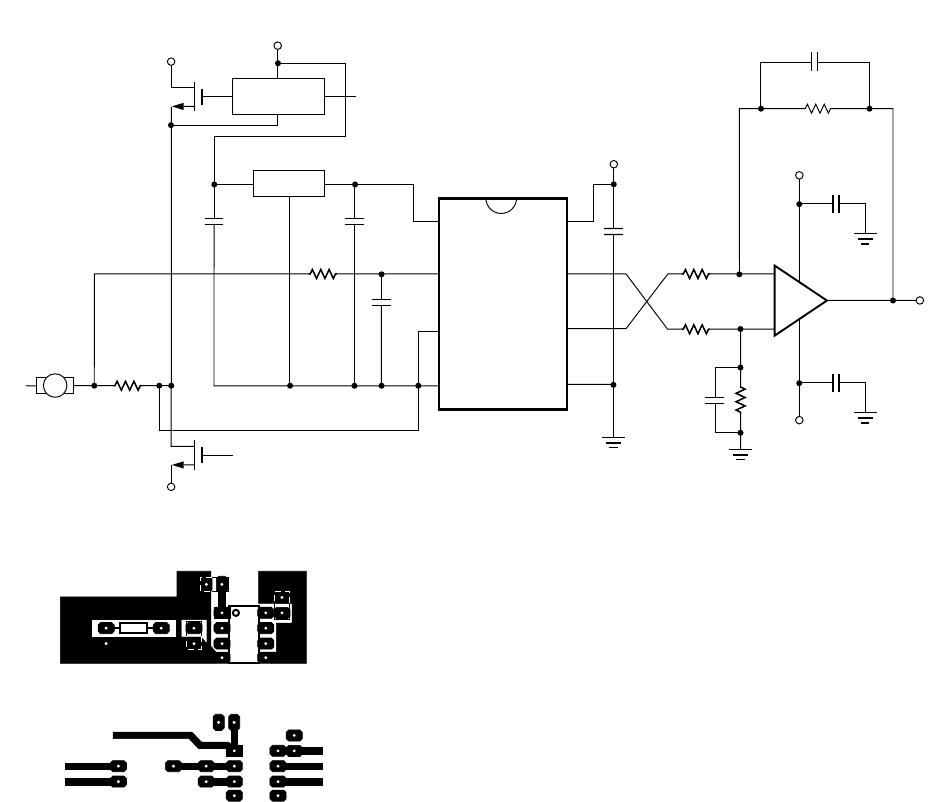
Figure 20. Motor Output Horsepower vs. Motor Phase Current and Supply
MOTOR PHASE CURRENT - A (rms)
15
5
40
10 25 30
0
35
0 35
25
10
20
440 V
380 V
220 V
120 V
30
20
5
15
MOTOR OUTPUT POWER - HORSEPOWER
The maximum average power dissipation in the sense
resistor can also be easily calculated by multiplying the
sense resistance times the square of the maximum RMS
current, which is about 1 W in the previous example. If
the power dissipation in the sense resistor is too high, the
resistance can be decreased below the maximum value
to decrease power dissipation. The minimum value of the
sense resistor is limited by precision and accuracy require-
ments of the design. As the resistance value is reduced,
the output voltage across the resistor is also reduced,
which means that the oset and noise, which are xed,
Current Sensing Resistors
The current sensing resistor should have low resistance (to
minimize power dissipation), low inductance (to minimize
di/dt induced voltage spikes which could adversely aect
operation), and reasonable tolerance (to maintain overall
circuit accuracy). Choosing a particular value for the
resistor is usually a compro-mise between minimizing
power dissipation and maximizing accu-racy. Smaller
sense resistance decreases power dissipation, while larger
sense resistance can improve circuit accuracy by utilizing
the full input range of the HCPL -7800(A).
The rst step in selecting a sense resistor is determining
how much current the resistor will be sensing. The graph
in Figure 20 shows the RMS current in each phase of a
three-phase induction motor as a function of average
motor output power (in horsepower, hp) and motor
drive supply voltage. The maximum value of the sense
re-sistor is determined by the current being measured
and the maxi-mum recommended input voltage of the
isolation amplier. The maximum sense resistance can
be calculated by taking the maxi-mum recommended
input voltage and dividing by the peak current that the
sense resistor should see during normal operation. For
example, if a motor will have a maximum RMS current
of 10 A and can experience up to 50% overloads during
normal op-eration, then the peak current is 21.1 A (=10 x
1.414 x 1.5). Assuming a maximum input voltage of 200
mV, the maximum value of sense resistance in this case
would be about 10 mΩ.
become a larger percentage of the signal amp-litude. The
selected value of the sense resistor will fall somewhere
between the minimum and maximum values, depending
on the particular requirements of a specic design.
When sensing currents large enough to cause signicant
heating of the sense resistor, the temperature coecient
(tempco) of the resistor can introduce nonlinearity due to
the signal dependent temperature rise of the resistor. The
eect increases as the resistor-to-ambient thermal resis-
tance increases. This eect can be minimized by reducing
the thermal resistance of the current sensing resistor or
by using a resistor with a lower tempco. Lowering the
thermal resistance can be accomplished by repositioning
the current sensing resistor on the PC board, by using
larger PC board traces to carry away more heat, or by
using a heat sink.
For a two-terminal current sensing resistor, as the value
of resistance decreases, the re-sistance of the leads
become a signicant percentage of the total resistance.
This has two primary eects on resistor accuracy. First,
the eective resistance of the sense resistor can become
dependent on factors such as how long the leads are, how
they are bent, how far they are inserted into the board,
and how far solder wicks up the leads during assembly
(these issues will be discussed in more detail shortly).
Second, the leads are typically made from a material, such
as copper, which has a much higher tempco than the
material from which the resistive element itself is made,
resulting in a higher tempco overall.
Both of these eects are eliminated when a four-terminal
current sensing resistor is used. A four- terminal resistor
has two additional terminals that are Kelvin-connected
directly across the resistive element itself; these two
terminals are used to monitor the voltage across the
resistive element while the other two terminals are used
to carry the load current. Because of the Kelvin connection,
any voltage drops across the leads carrying the load current
should have no impact on the measured voltage.
When laying out a PC board for the current sensing
resistors, a couple of points should be kept in mind. The
Kelvin connections to the resistor should be brought
together under the body of the resistor and then run very
close to each other to the input of the HCPL-7800(A); this
minimizes the loop area of the connection and reduces
the possibility of stray magnetic elds from interfering
with the measured signal. If the sense resistor is not
located on the same PC board as the HCPL-7800(A) circuit,
a tightly twisted pair of wires can accomplish the same
thing.
Also, multiple layers of the PC board can be used to
increase current carrying capacity. Numerous plated-
through vias should surround each non-Kelvin terminal of