Full-Bridge PWM Motor Driver
A4973
8
Allegro MicroSystems, LLC
115 Northeast Cutoff
Worcester, Massachusetts 01615-0036 U.S.A.
1.508.853.5000; www.allegromicro.com
The current-sensing comparator functions down to ground
allowing the device to be used in microstepping, sinusoidal, and
other varying current-profile applications.
Thermal Considerations. For reliable operation it is
recommended that the maximum junction temperature be kept
below 110°C to 125°C. The junction temperature can be measured
best by attaching a thermocouple to the power tab/batwing of the
device and measuring the tab temperature, T
TAB
. The junction
temperature can then be approximated by using the formula:
T
J
T
TAB
+ I
2
LOAD
× R
DS(on)
x R
JT
The value for R
θJT
is given in the package thermal resistance table
for the appropriate package.
The power dissipation of the batwing packages can be improved
by 20% to 30% by adding a section of printed circuit board
copper (typically 6 to 18 square centimeters) connected to the
batwing terminals of the device.
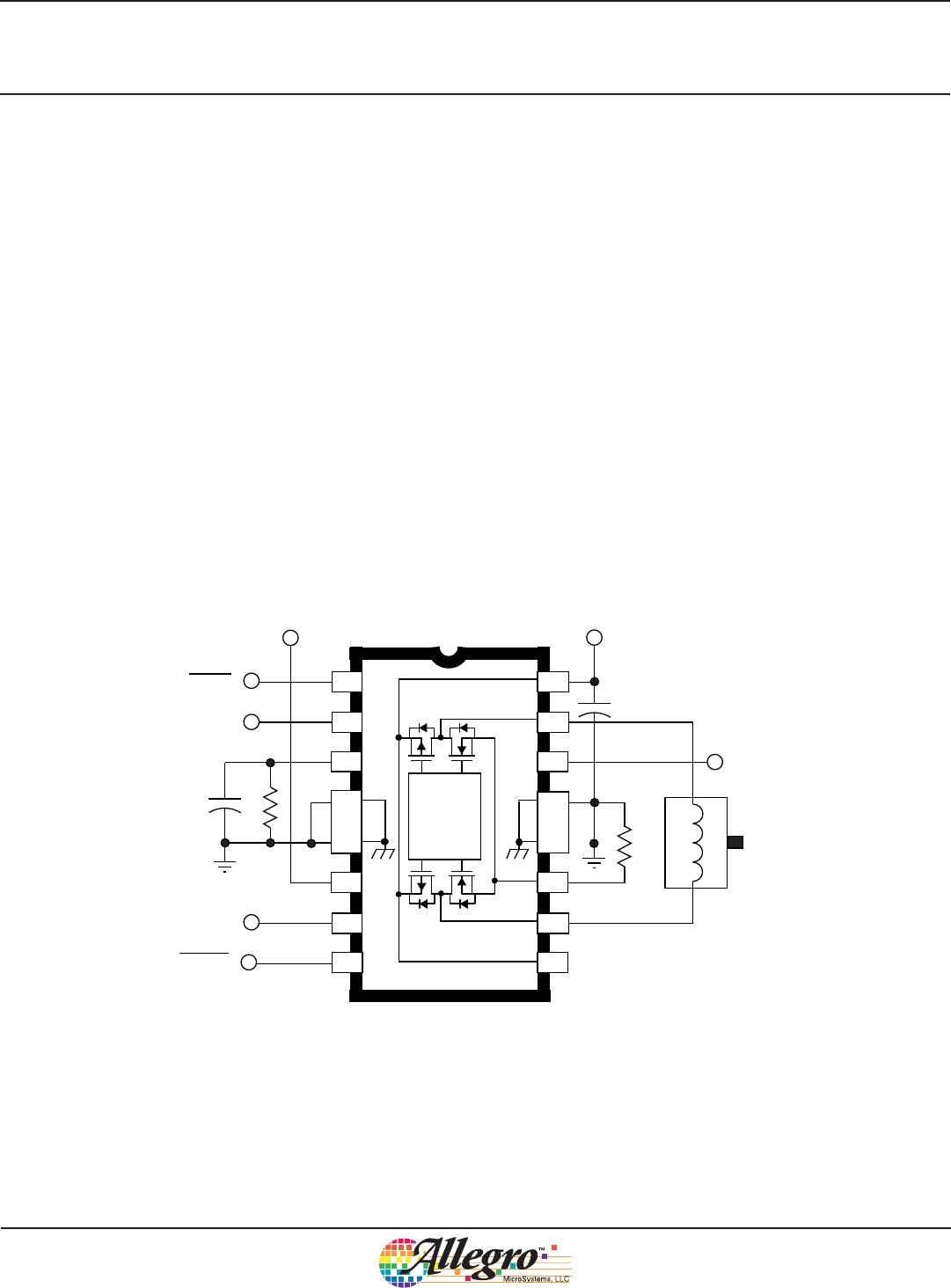
PCB Layout. The load supply terminal, V
BB
, should
be decoupled with an electrolytic capacitor (>47 μF is
recommended) placed as close to the device as is physically
practical. To minimize the effect of system ground I x R drops on
the logic and reference input signals, the system ground should
have a low-resistance return to the motor supply voltage. See also
the Current Sensing and Thermal Considerations sections, above.
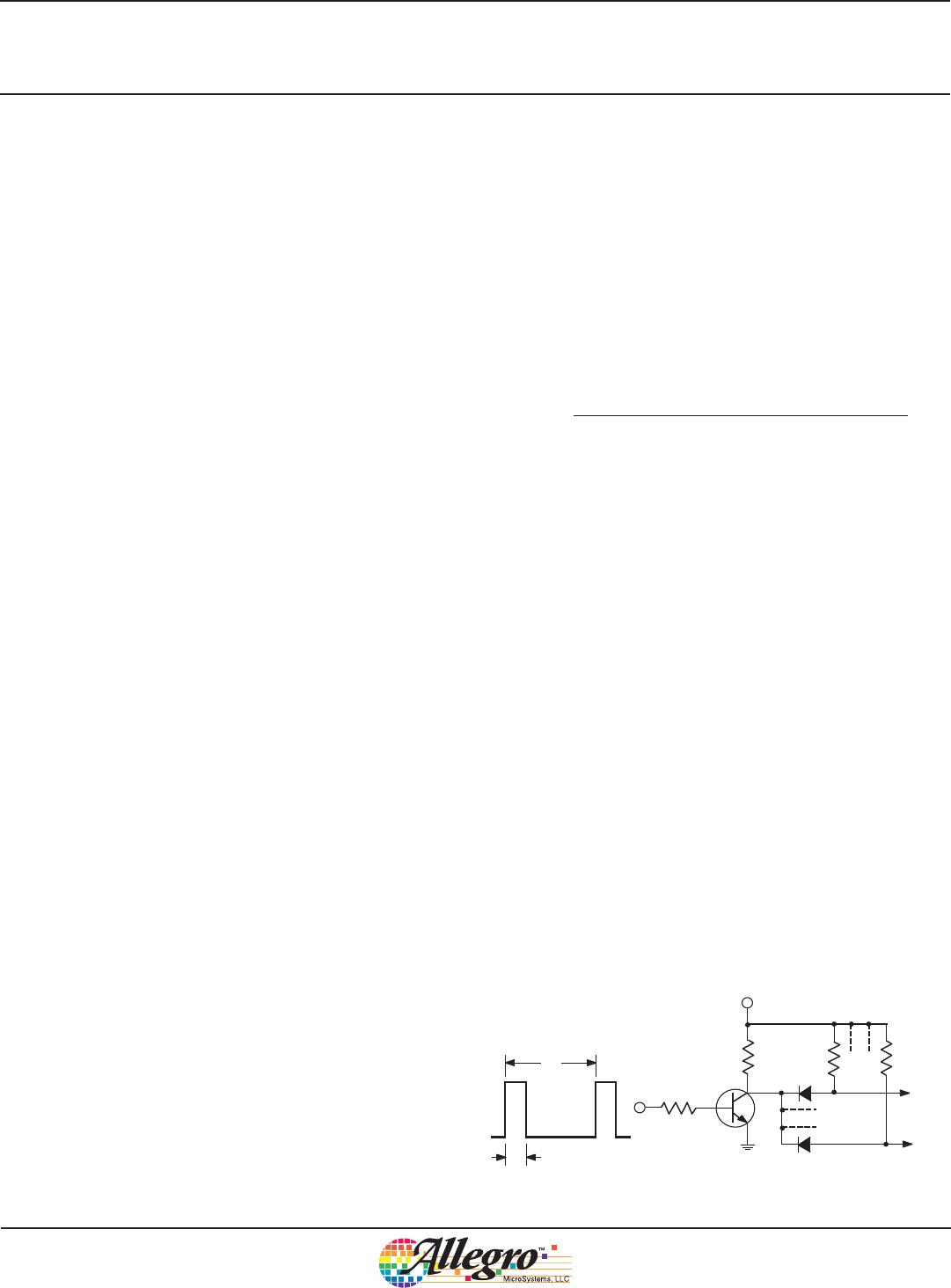
Fixed Off-Time Selection. With increasing values of t
OFF,
switching losses will decrease, low-level load-current regulation
will improve, EMI will be reduced, the PWM frequency will
decrease, and ripple current will increase. The value of t
OFF
can
be chosen for optimization of these parameters. For applications
where audible noise is a concern, typical values of t
OFF
are chosen
to be in the range of 15 to 35 μs.
Stepper Motor Applications. The MODE terminal can be
used to optimize the performance of the device in microstepping/
sinusoidal stepper-motor drive applications. When the load
current is increasing, slow decay mode is used to limit the
switching losses in the device and iron losses in the motor. This
also improves the maximum rate at which the load current can
increase (as compared to fast decay) due to the slow rate of decay
during t
OFF
. When the load current is decreasing, fast-decay mode
is used to regulate the load current to the desired level. This
prevents tailing of the current profile caused by the back-EMF
voltage of the stepper motor.
In stepper-motor applications applying a constant current to
the load, slow-decay mode PWM is typically used to limit the
switching losses in the device and iron losses in the motor.
DC Motor Applications. In closed-loop systems, the
speed of a dc motor can be controlled by PWM of the PHASE
or ENABLE inputs, or by varying the reference input voltage
(REF). In digital systems (microprocessor controlled), PWM of
the PHASE or ENABLE input is used typically thus avoiding
the need to generate a variable analog voltage reference. In this
case, a dc voltage on the REF input is used typically to limit the
maximum load current.
In dc servo applications, which require accurate positioning
at low or zero speed, PWM of the PHASE input is selected
typically. This simplifies the servo control loop because the
transfer function between the duty cycle on the PHASE input and
the average voltage applied to the motor is more linear than in the
case of ENABLE PWM control (which produces a discontinuous
current at low current levels).
With bidirectional dc servo motors, the PHASE terminal can be
used for mechanical direction control. Similar to when braking
the motor dynamically, abrupt changes in the direction of a
rotating motor produces a current generated by the back-EMF.
The current generated will depend on the mode of operation. If
the internal current control circuitry is not being used, then the
maximum load current generated can be approximated by I
LOAD
=
(V
BEMF
+ V
BB
)/R
LOAD
where V
BEMF
is proportional to the motor’s
speed. If the internal slow current-decay control circuitry is used,
then the maximum load current generated can be approximated
by I
LOAD
= V
BEMF
/R
LOAD
. For both cases care must be taken to