LTC3626
17
3626fa
For more information www.linear.com/LTC3626
applicaTions inForMaTion
Internal/External Loop Compensation
The LTC3626 provides the option to use a fixed internal
loop compensation network to reduce both the required
external component count and design time. The internal
loop compensation network can be selected by connect
-
ing the ITH pin to the INTV
CC
pin. To ensure stability, it
is recommended that the internal compensation be used
at operating frequencies of 1MHz or greater. When using
internal compensation, a reasonable starting point for
the minimum amount of output capacitance necessary
for stability can be found as the greater of either 22µF or
C
OUT
defined by the equation:
C
OUT
>
V
OUT
Alternatively, the user may choose specific external loop
compensation components to optimize the main control
loop transient response as desired. External loop com
-
pensation is chosen by simply connecting the desired
network to the ITH pin.
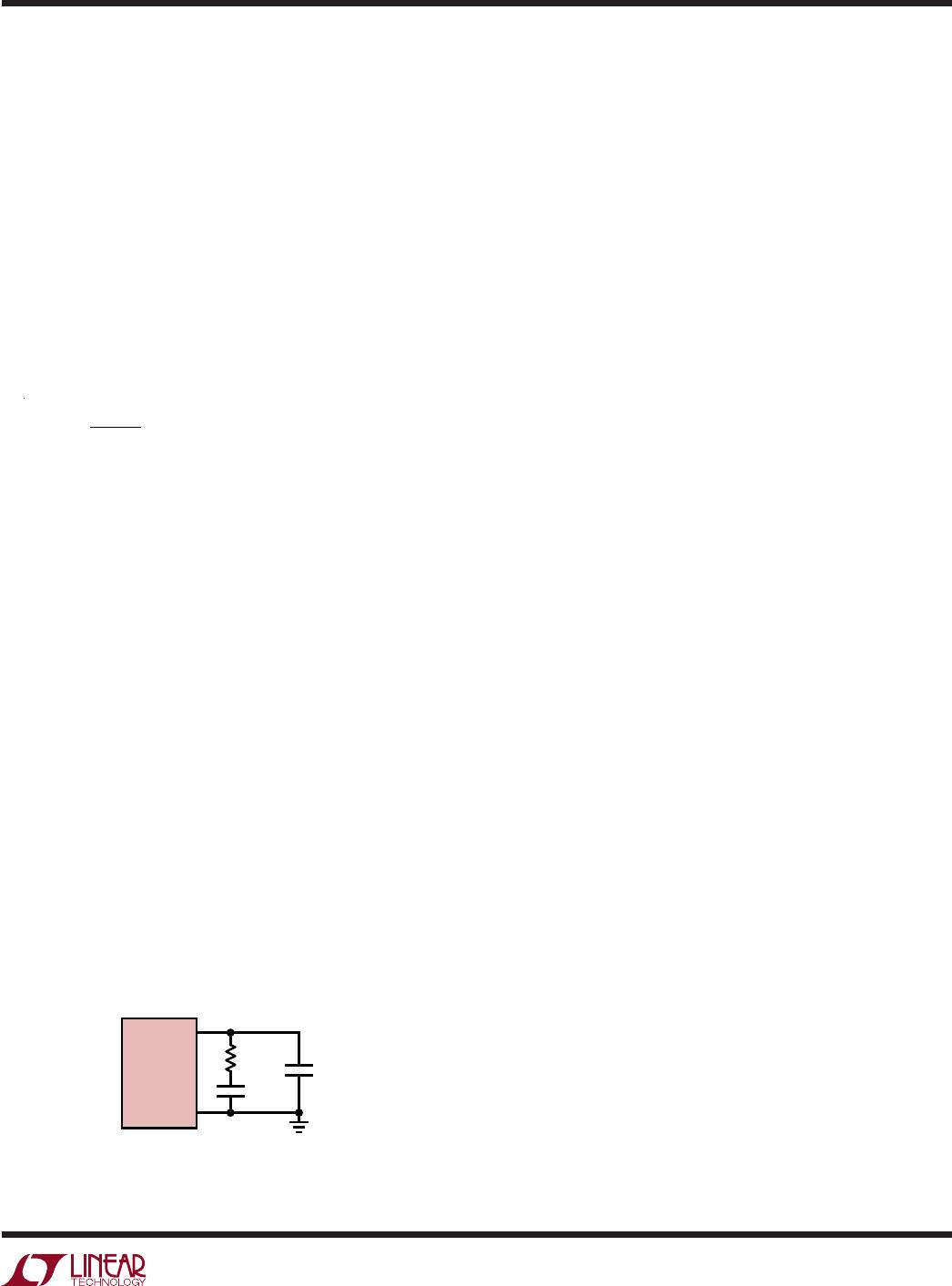
Suggested compensation component values are shown
in Figure 3. For a 2MHz application, an R-C (R
COMP
and
C
COMP
in Figure 3) network of 220pF and 13kΩ provides
a good starting point. The bandwidth of the loop increases
with decreasing C. If R is increased by the same factor
that C is decreased, the zero frequency will be kept the
same, thereby keeping the phase the same in the most
critical frequency range of the feedback loop. A 10pF
bypass capacitor (C
BYP
in Figure 3) the ITH pin is recom-
mended to filter out high frequency coupling from stray
board capacitance.
In addition, a feedforward capacitor,
C
F
, can be added to improve the high frequency response,
as previously shown in Figure 2. Capacitor C
F
provides
phase lead by creating a high frequency zero with R1
which improves the phase margin.
Checking Transient Response
The regulator loop response can be checked by observing
the response of the system to a load step. When configured
for external compensation, the availability of the ITH pin
not only allows optimization of the control loop behavior
but also provides a DC-coupled and AC-filtered closed-loop
response test point. The DC step, rise time, and settling
behavior at this test point reflect the system’s closed-
loop response. Assuming a predominantly second order
system, the phase margin and/or damping factor can be
estimated by observing the percentage of overshoot seen
at this pin with a high impedance, low capacitance probe.
The ITH external components shown in Figure 3 will pro
-
vide an adequate starting point for most applications. The
series R-C filter sets the pole-zero loop compensation. The
values can be modified slightly, from approximately 0.5
to 2 times their suggested values, to optimize transient
response once the final PC layout is done and the particular
output capacitor type and value have been determined.
The specific output capacitors must be selected because
their various types and values determine the loop feedback
factor, gain, and phase. An output current pulse of 20%
to 100% of full load current, with a rise time of 1μs to
10μs, will produce output voltage and ITH pin waveforms
that will give a sense of the overall loop stability without
breaking the feedback loop.
When observing the response of V
OUT
to a load step, the
initial output voltage step may not be within the bandwidth
of the feedback loop. As a result, the standard second
order overshoot/DC ratio cannot be used to estimate
phase margin. The output voltage settling behavior is
related to the stability of the closed-loop system and will
demonstrate the actual overall supply performance. For
a detailed explanation of optimizing the compensation
components, including a review of control loop theory,
refer to Linear Technology Application Note 76. As shown
in Figure 2 a feed-forward capacitor, C
F
, may be added
across feedback resistor R1 to improve the high frequency
response of the system. Capacitor C
F
provides phase lead
by creating a high frequency zero with R1.
ITH
R
COMP
13k
C
COMP
220pF
C
SGND
LTC3626
Figure 3. Compensation Components