REV. D–14–
AD7713
DIGITAL FILTERING
The AD7713’s digital filter behaves like a similar analog filter,
with a few minor differences.
First, since digital filtering occurs after the A-to-D conversion
process, it can remove noise injected during the conversion
process. Analog filtering cannot do this.
On the other hand, analog filtering can remove noise superimposed
on the analog signal before it reaches the ADC. Digital filtering
cannot do this, and noise peaks riding on signals near full scale
have the potential to saturate the analog modulator and digital
filter, even though the average value of the signal is within limits.
To alleviate this problem, the AD7713 has overrange headroom
built into the ⌺-⌬ modulator and digital filter, which allows over-
range excursions of 5% above the analog input range. If noise
signals are larger than this, consideration should be given to analog
input filtering or to reducing the input channel voltage so that its
full scale is half that of the analog input channel full scale. This will
provide an overrange capability greater than 100% at the expense
of reducing the dynamic range by 1 bit (50%).
Filter Characteristics
The cutoff frequency of the digital filter is determined by the value
loaded to Bits FS0 to FS11 in the control register. At the maxi-
mum clock frequency of 2 MHz, the minimum cutoff frequency of
the filter is 0.52 Hz, while the maximum programmable cutoff
frequency is 53.9 Hz.
Figure 6 shows the filter frequency response for a cutoff frequency
of 0.52 Hz, which corresponds to a first filter notch frequency of
2 Hz. This is a (sinx/x)
3
response (also called sinc
3
) that provides
>100 dB of 50 Hz and 60 Hz rejection. Programming a differ-
ent cutoff frequency via FS0 to FS11 does not alter the profile
of the filter response; it changes the frequency of the notches as
outlined in the Control Register section.
–240
–180
–200
–220
–60
–80
–100
–120
–140
–160
0
–20
–40
024681012
FREQUENCY (Hz)
GAIN (dB)
Figure 6. Frequency Response of AD7713 Filter
Since the AD7713 contains this on-chip, low-pass filtering,
there is a settling time associated with step function inputs, and
data on the output will be invalid after a step change until the
settling time has elapsed. The settling time depends upon the
notch frequency chosen for the filter. The output data rate
equates to this filter notch frequency, and the settling time of
the filter to a full-scale step input is four times the output data
period. In applications using both input channels, the settling
time of the filter must be allowed to elapse before data from the
second channel is accessed.
Post Filtering
The on-chip modulator provides samples at a 3.9 kHz output
rate. The on-chip digital filter decimates these samples to
provide data at an output rate that corresponds to the pro-
grammed first notch frequency of the filter. Since the output
data rate exceeds the Nyquist criterion, the output rate for a
given bandwidth will satisfy most application requirements.
However, there may be some applications that require a higher
data rate for a given bandwidth and noise performance. Appli-
cations that need this higher data rate will require some post
filtering following the digital filter of the AD7713.
For example, if the required bandwidth is 1.57 Hz but the required
update rate is 20 Hz, the data can be taken from the AD7713 at
the 20 Hz rate giving a –3 dB bandwidth of 5.24 Hz. Post filtering
can be applied to this to reduce the bandwidth and output noise,
to the 1.57 Hz bandwidth level, while maintaining an output rate
of 20 Hz.
Post filtering can also be used to reduce the output noise from
the device for bandwidths below 0.52 Hz. At a gain of 128, the
output rms noise is 250 nV. This is essentially device noise or
white noise, and since the input is chopped, the noise has a flat
frequency response. By reducing the bandwidth below 0.52 Hz,
the noise in the resultant pass band can be reduced. A reduction
in bandwidth by a factor of 2 results in a √2 reduction in the
output rms noise. This additional filtering will result in a longer
settling time.
Antialias Considerations
The digital filter does not provide any rejection at integer
multiples of the modulator sample frequency (n ⫻ 3.9 kHz,
where n = 1, 2, 3...). This means that there are frequency
bands, ±f
3
dB wide (f
3
dB is cutoff frequency selected by FS0
to FS11), where noise passes unattenuated to the output.
However, due to the AD7713’s high oversampling ratio, these
bands occupy only a small fraction of the spectrum, and most
broadband noise is filtered. In any case, because of the high
oversampling ratio, a simple, RC, single-pole filter is generally
sufficient to attenuate the signals in these bands on the analog
input and thus provide adequate antialiasing filtering.
If passive components are placed in front of the AIN1 and
AIN2 inputs of the AD7713, care must be taken to ensure that
the source impedance is low enough so as not to introduce
gain errors in the system. The dc input impedance for the
AIN1 and AIN2 inputs is over 1 GΩ. The input appears as a
dynamic load that varies with the clock frequency and with the
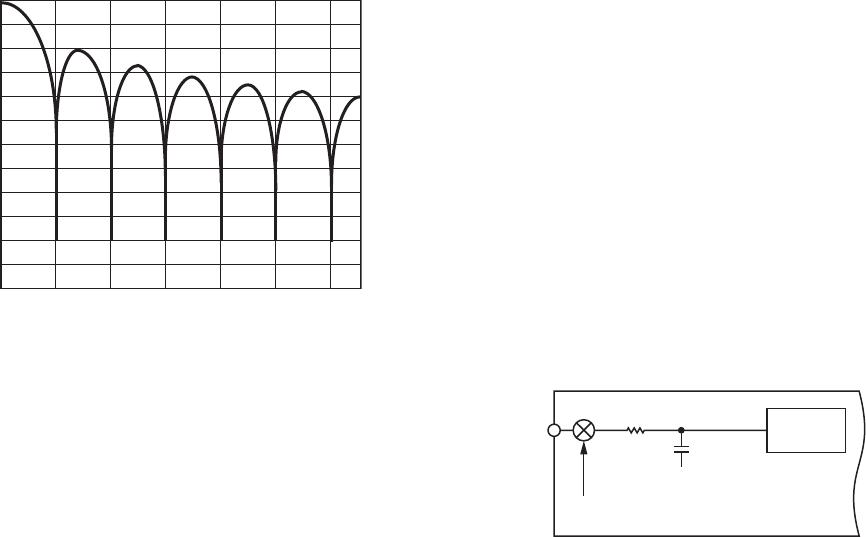
selected gain (see Figure 7). The input sample rate, as shown
in Table III, determines the time allowed for the analog input
capacitor, C
IN
, to be charged. External impedances result in a
longer charge time for this capacitor, which result in gain er-
rors being introduced on the analog inputs. Both inputs of the
differential input channels look into similar input circuitry.
AIN
HIGH
IMPEDANCE
> 1G
⍀
R
INT
(7k⍀ TYP)
C
INT
(11.5pF TYP)
SWITCHING FREQUENCY DEPENDS ON
f
CLKIN
AND SELECTED GAIN
V
BIAS
Figure 7. AIN1, AIN2 Input Impedance

