LTC4000
23
4000fb
For more information www.linear.com/LTC4000
applicaTions inForMaTion
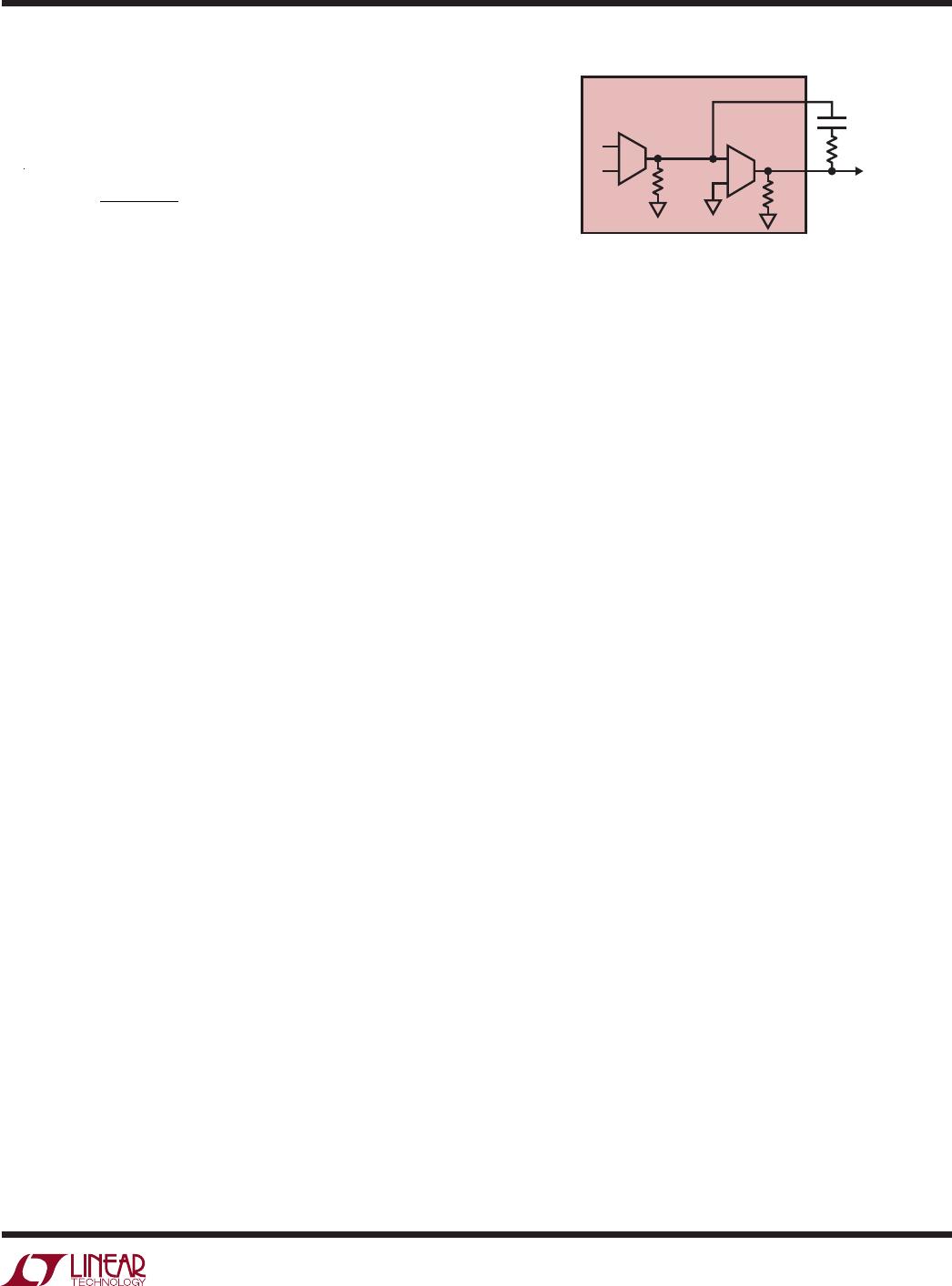
Figure 11. Error Amplifier Followed by Output Amplifier Driving
CC and ITH Pins
Setting the Input Voltage Monitoring Resistor Divider
The falling threshold voltage level for this monitoring
function can be calculated as follows:
R
VM1
=
V
VM _RST
1.193V
– 1
• R
VM2
where R
VM1
and R
VM2
form a resistor divider connected
between the monitored voltage and GND, with the center
tap point connected to the VM pin as shown in Figure 6. The
rising threshold voltage level can be calculated similarly.
Compensation
In order for the LTC4000 to control the external DC/DC
converter, it has to be able to overcome the sourcing bias
current of the ITH or VC pin of the DC/DC converter. The
typical sinking capability of the LTC4000 at the ITH pin is
1mA at 0.4V with a maximum voltage range of 0V to 6V.
It is imperative that the local feedback of the DC/DC con-
verter be set up such that during regulation of any of the
LTC4000 loops this local loop is out of regulation and
sources as much current as possible from its ITH/VC pin.
For example for a DC/DC converter regulating its output
voltage, it is recommended that the converter feedback
divider is programmed to be greater than 110% of the
output voltage regulation level programmed at the OFB pin.
There are four feedback loops to consider when setting up
the compensation for the LTC4000.
As mentioned
before
these loops are: the input current loop, the charge current
loop, the float voltage loop and the output voltage loop.
All of these loops have an error amp (A4-A7) followed by
another amplifier (A10) with the intermediate node driv-
ing the CC pin and the output of A10 driving the ITH pin
as shown in Figure 11. The most common compensation
network of a series capacitor (C
C
) and resistor (R
C
) between
the CC pin and the ITH pin is shown here.
Each of the loops has slightly different dynamics due to
differences in the feedback signal path. The analytic descrip-
tion of each of the loops is included in the Appendix sec-
tion. In most situations, an alternative empirical approach
to compensation, as described here, is more practical.
CC
ITH
LTC4000
–
+
C
C
4000 F11
R
C
A4-A7
g
m4-7
= 0.2m
A10
g
m10
= 0.1m
+
–
R
O4-7
R
O10
Empirical Loop Compensation
Based on the five analytical expressions given in the Ap-
pendix section, and the transfer function from the ITH
pin to the input and output current of the external DC/DC
converter, the user can analytically determine the complete
loop transfer function of each of the loops. Once these are
obtained, it is a matter of analyzing the gain and phase
bode plots to ensure that there is enough phase and gain
margin at unity crossover with the selected values of R
C
and C
C
for all operating conditions.
Even though it is clear that an analytical compensation
method is possible, sometimes certain complications
render this method difficult to tackle. These complica-
tions include the lack of easy availability of the switching
converter transfer function from the ITH or VC control
node to its input or output current, and the variability of
parameter values of the components such as the ESR of
the output capacitor or the R
DS(ON)
of the external PFETs.
Therefore a simpler and more practical way to compensate
the LTC4000 is provided here. This empirical method
involves injecting an AC signal into the loop, observing
the loop transient response and adjusting the
C
C
and R
C
values to quickly iterate towards the final values. Much
of the detail of this method is derived from Application
Note19 which can be found at www.linear.com using
AN19 in the search box.
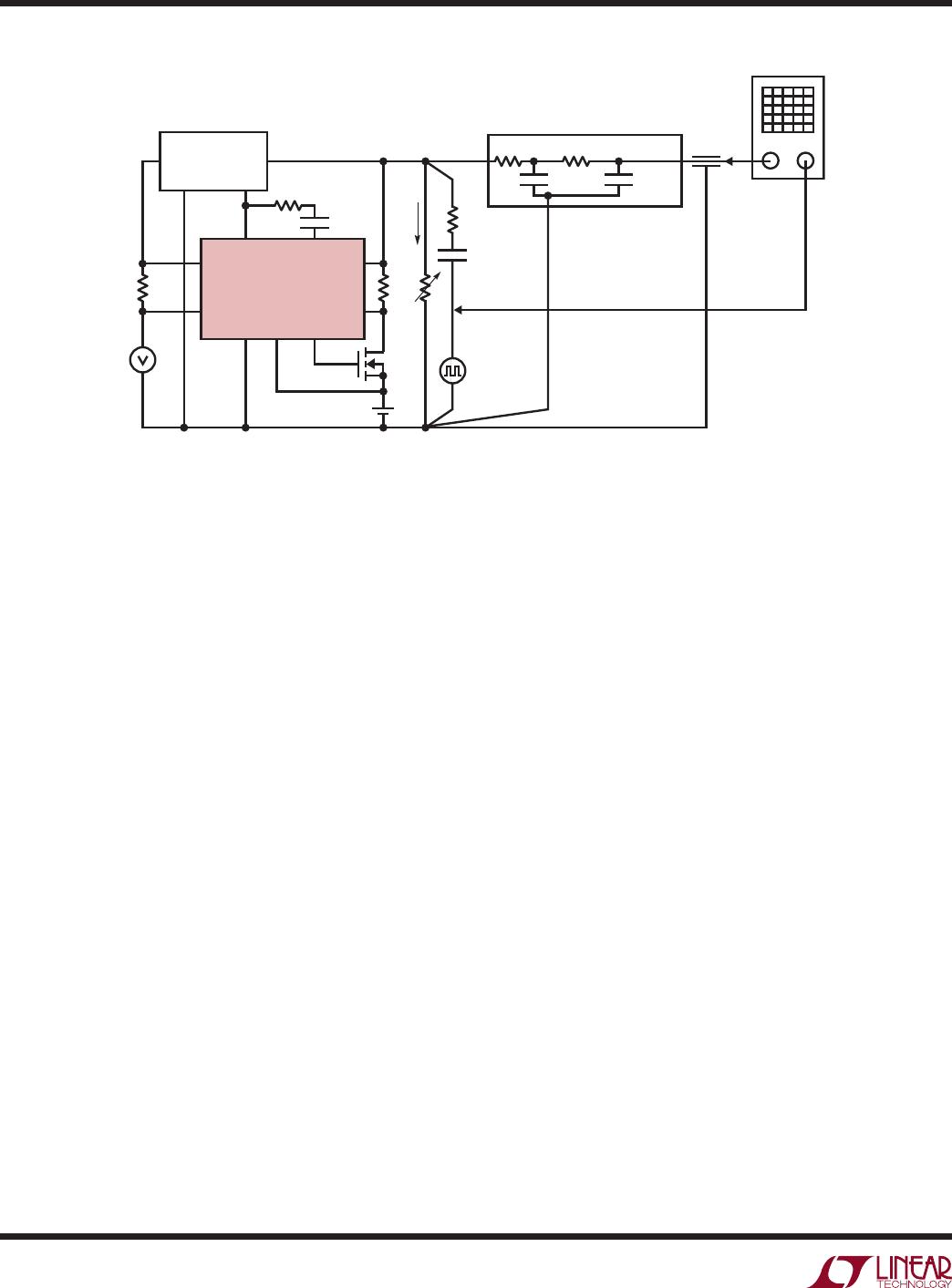
Figure 12 shows the recommended setup to inject an
AC-coupled output load variation into the loop. A function
generator with 50Ω output impedance is coupled through
a 50Ω/1000µF series RC network to the regulator output.