MAX1710/MAX1711
High-Speed, Digitally Adjusted
Step-Down Controllers for Notebook CPUs
14 ______________________________________________________________________________________
voltage rises approximately 1% (up to 1/2 the peak
amplitude of the ripple waveform as a limit) when under
light loads.
Integrators have both beneficial and detrimental char-
acteristics. While they do correct for drops due to DC
bus resistance and tighten the DC output voltage toler-
ance limits by averaging the peak-to-peak output
ripple, they can interfere with achieving the fastest pos-
sible load-transient response. The fastest transient
response is achieved when all three integrators are dis-
abled. This works very well when the MAX1710/
MAX1711/MAX1712 circuit can be placed very close to
the CPU.
There is often a connector, or at least many milliohms of
PC board trace resistance, between the DC-DC convert-
er and the CPU. In these cases, the best strategy is to
place most of the bulk bypass capacitors close to the
CPU, with just one capacitor on the other side of the con-
nector near the MAX1710/MAX1711/MAX1712 to control
ripple if the CPU card is unplugged. In this situation, the
remote-sense lines and integrators provide a real benefit.
When FBS is connected to V
CC
so that all three integra-
tors are disabled, CC can be left unconnected, which
eliminates a component.
Automatic Pulse-Skipping Switchover
At light loads, an inherent automatic switchover to PFM
takes place. This switchover is effected by a comparator
that truncates the low-side switch on-time at the inductor
current’s zero crossing. This mechanism causes the
threshold between pulse-skipping PFM and nonskipping
PWM operation to coincide with the boundary between
continuous and discontinuous inductor-current operation
(also known as the “critical conduction” point;
see Continuous to Discontinuous Inductor Current Point
vs. Input Voltage graph in the Typical Operating
Characteristics). For a battery range of 7V to 24V, this
threshold is relatively constant, with only a minor depen-
dence on battery voltage.
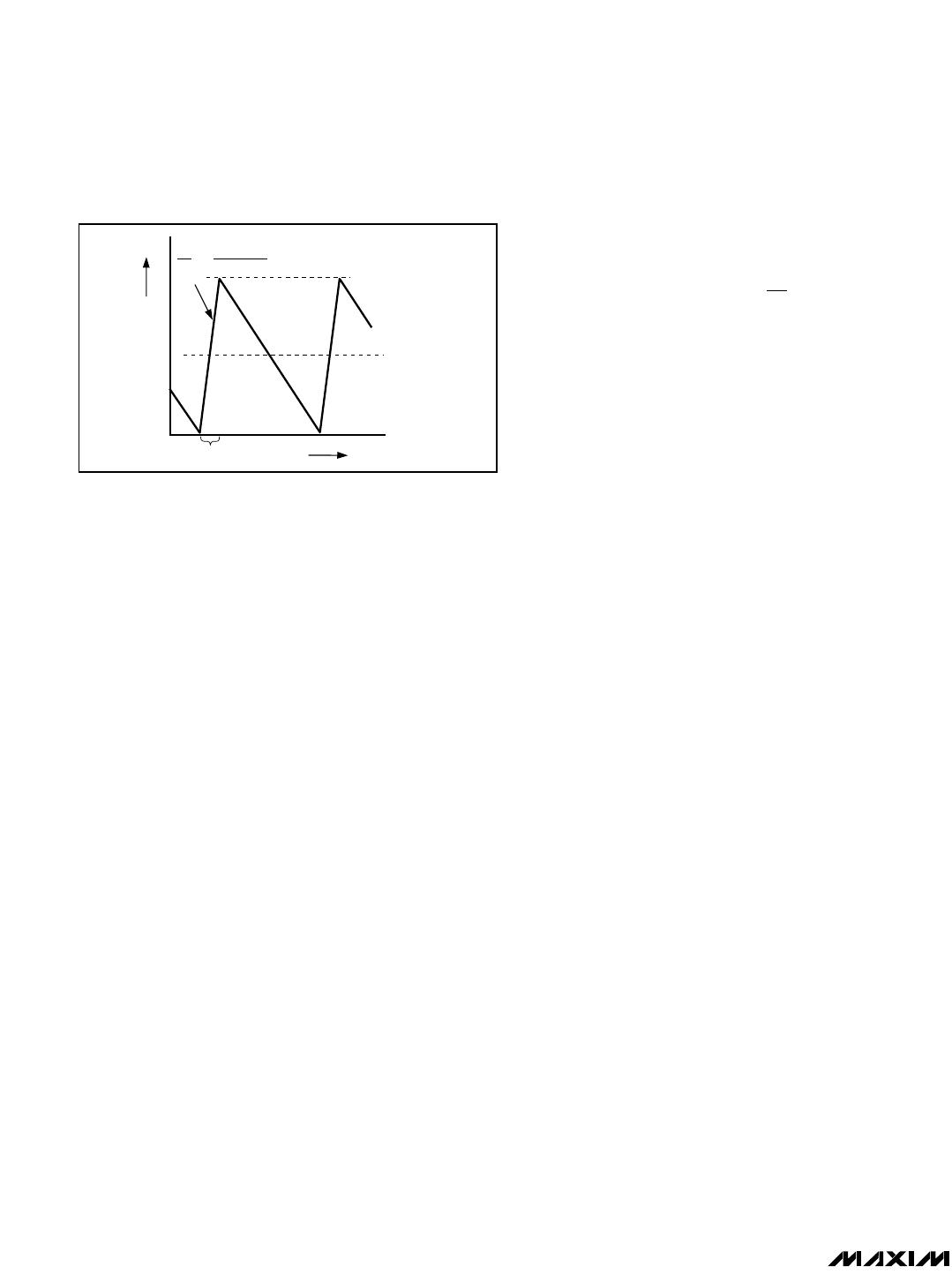
where K is the On-Time Scale factor (Table 6). The load-
current level at which PFM/PWM crossover occurs,
I
LOAD(SKIP)
, is equal to 1/2 the peak-to-peak ripple cur-
rent, which is a function of the inductor value (Figure 3).
For example, in the standard application circuit with t
ON
= 300ns at 24V, V
OUT
= 2V, and L = 2µH, switchover to
pulse-skipping operation occurs at I
LOAD
= 1.65A or
about 1/4 full load. The crossover point occurs at an
even lower value if a swinging (soft-saturation) inductor
is used.
The switching waveforms may appear noisy and asyn-
chronous when light loading causes pulse-skipping
operation, but this is a normal operating condition that
results in high light-load efficiency. Trade-offs in PFM
noise vs. light-load efficiency can be made by varying
the inductor value. Generally, low inductor values pro-
duce a broader efficiency vs. load curve, while higher
values result in higher full-load efficiency (assuming that
the coil resistance remains fixed) and less output voltage
ripple. Penalties for using higher inductor values include
larger physical size and degraded load-transient
response (especially at low input voltage levels).
Forced-PWM Mode (
SSKKIIPP
= High)
The low-noise, forced-PWM mode (SKIP driven high) dis-
ables the zero-crossing comparator, which controls the
low-side switch on-time. This causes the low-side gate-
drive waveform to become the complement of the high-
side gate-drive waveform. This in turn causes the
inductor current to reverse at light loads, as the PWM
loop strives to maintain a duty ratio of V
OUT
/V
IN
. The
benefit of forced-PWM mode is to keep the switching fre-
quency fairly constant, but it comes at a cost: the no-
load battery current can be as high as 40mA or more.
Forced-PWM mode is most useful for reducing audio-fre-
quency noise, improving load-transient response, pro-
viding sink-current capability for dynamic output voltage
adjustment, and improving the cross-regulation of multi-
ple-output applications that use a flyback transformer or
coupled inductor.
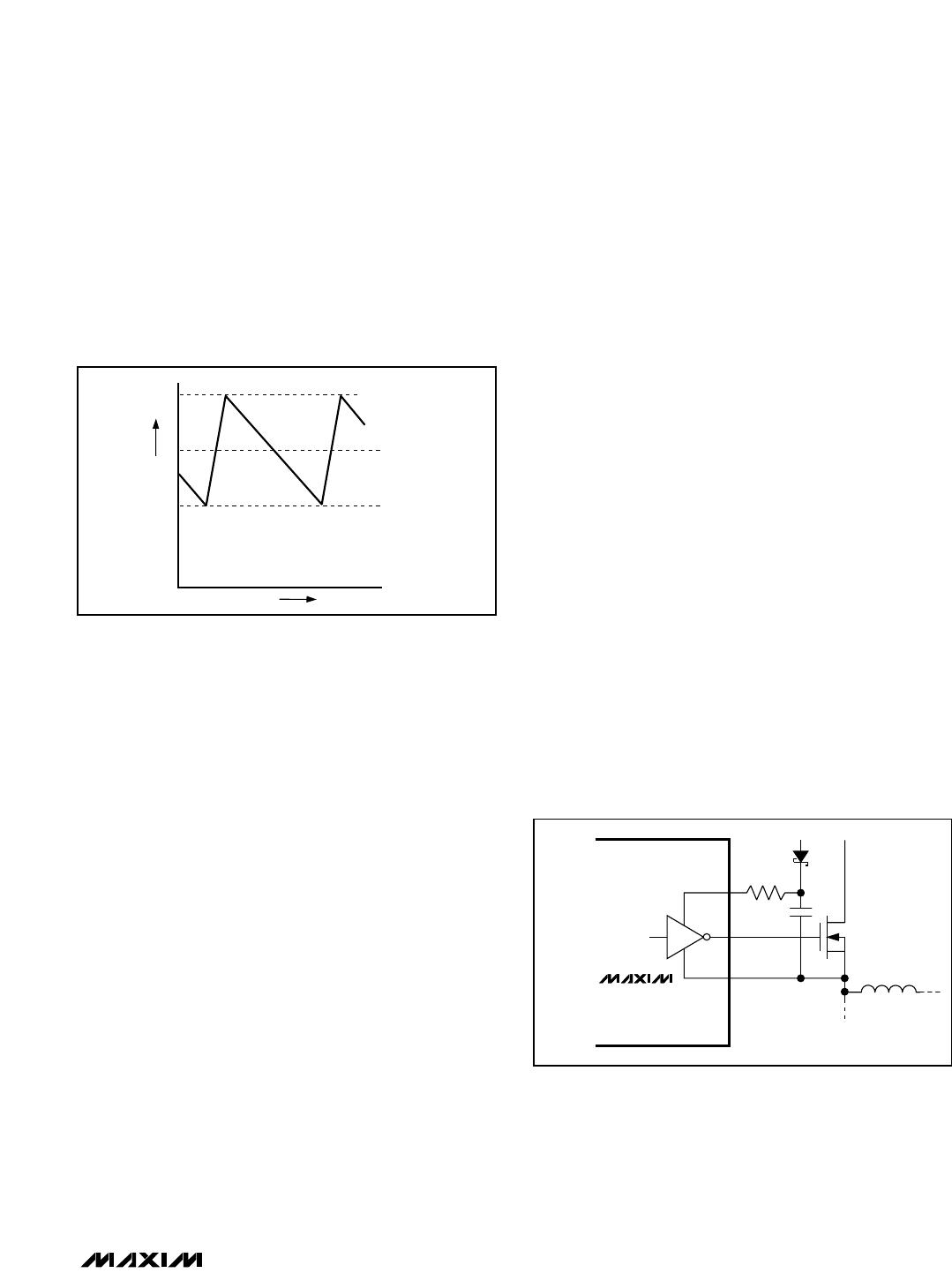
Current-Limit Circuit (ILIM)
The current-limit circuit employs a unique “valley” cur-
rent-sensing algorithm that uses the on-state resistance
of the low-side MOSFET as a current-sensing element. If
the current-sense signal is above the current-limit
threshold, the PWM is not allowed to initiate a new cycle
(Figure 4). The actual peak current is greater than the
current-limit threshold by an amount equal to the induc-