MT9V024/D
www.onsemi.com
9
For Simultaneous mode, if the exposure time registers
(coarse shutter width total plus Fine Shutter Width Total)
exceed the total readout time, then the vertical blanking time
is internally extended automatically to adjust for the
additional integration time required. This extended value is
not written back to the vertical blanking registers. The
vertical blank register can be used to adjust frame−to−frame
readout time. This register does not affect the exposure time
but it may extend the readout time.
Table 5. FRAME TIME − LONG INTEGRATION TIME
Parameter Name
Equation
(Number of Master Clock Cycles)
Default Timing at 26.66 MHz
V’ Vertical blanking (long integration
time)
Context A: (R0x0B + 2 − R0x03) ×
(A + Q) + R0xD5 + 4
Context B: (R0xD2 + 2 − R0xCB) ×
(A + Q) + R0xD8 + 4
38,074 pixel clocks
= 38,074 master = 1.43ms
F” Total frame time (long integration
exposure time)
(R0x0B + 2) × (A + Q) + 4 444,154 pixel clocks
= 444,154 master = 16.66ms
4. The MT9V024 uses column parallel analog−digital converters; thus short row timing is not possible. The minimum total row time is 704
columns (horizontal width + horizontal blanking). The minimum horizontal blanking is 61 for normal mode, 71 for column bin 2 mode, and 91
for column bin 4 mode. When the window width is set below 643, horizontal blanking must be increased. In binning mode, the minimum row
time is R0x04+R0x05 = 704.
SERIAL BUS DESCRIPTION
Registers are written to and read from the MT9V024
through the two−wire serial inter−face bus. The MT9V024
is a serial interface slave with four possible IDs (0x90, 0x98,
0xB0 and 0xB8) determined by the S_CTRL_ADR0 and
S_CTRL_ADR1 input pins. Data is transferred into the
MT9V024 and out through the serial data (S
DATA) line. The
S
DATA line is pulled up to VDD off−chip by a 1.5 k resistor.
Either the slave or master device can pull the S
DATA line
down−the serial interface protocol determines which device
is allowed to pull the S
DATA line down at any given time. The
registers are 16−bit wide, and can be accessed through 16−or
8−bit two−wire serial interface sequences.
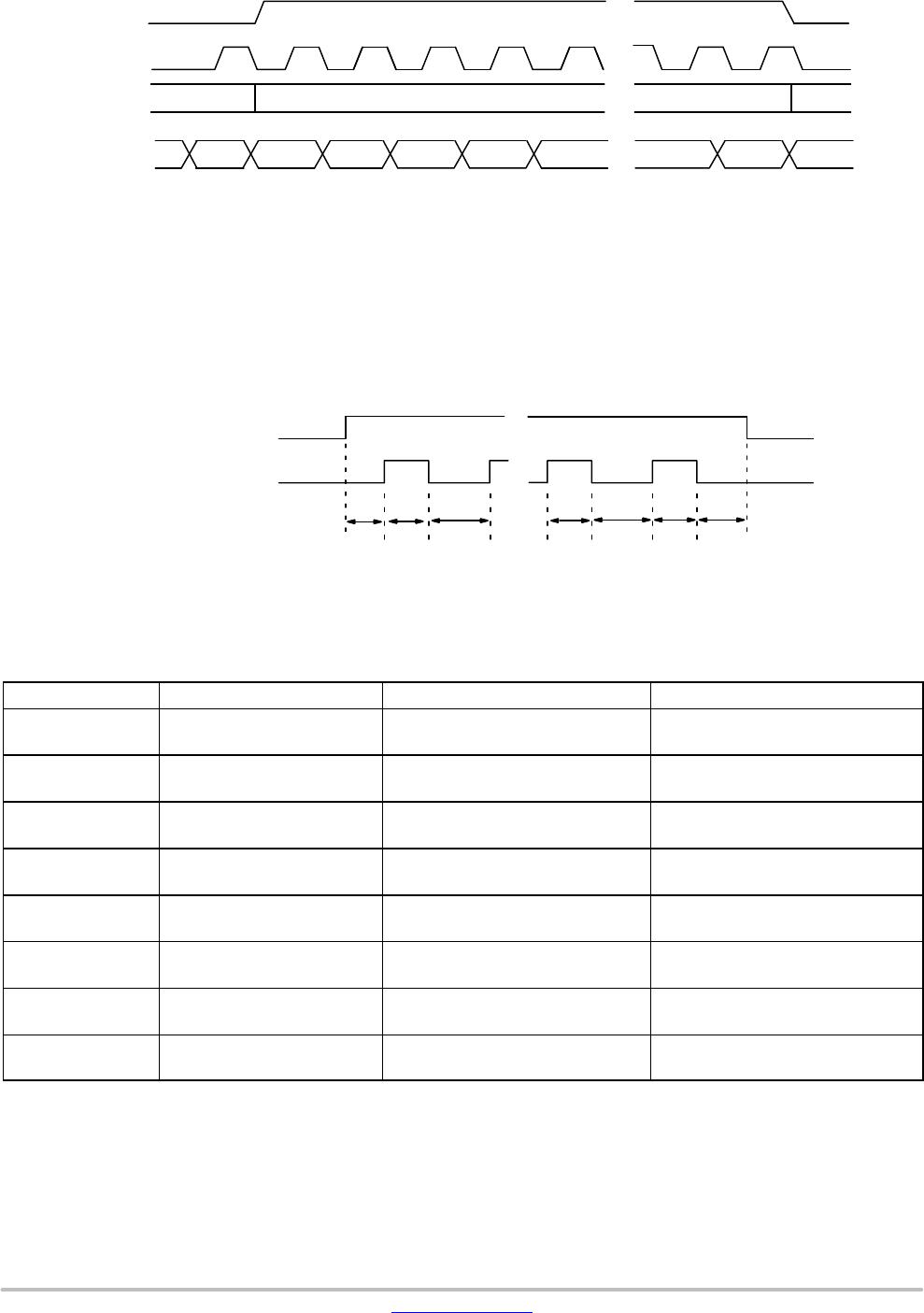
Protocol
1. a start bit
2. the slave device 8−bit address
3. a(n) (no) acknowledge bit
4. an 8−bit message
5. a stop bit
Start Bit
The start bit is defined as a HIGH−to−LOW transition of
the data line while the clock line is HIGH.
Slave Address
The 8−bit address of a two−wire serial interface device
consists of 7 bits of address and
1 bit of direction. A “0” in the LSB of the address indicates
write mode, and a “1” indicates read mode. As indicated
above, the MT9V024 allows four possible slave addresses
determined by the two input pins, S_CTRL_ADR0 and
S_CTRL_ADR1.
Acknowledge Bit
The master generates the acknowledge clock pulse. The
transmitter (which is the master when writing, or the slave
when reading) releases the data line, and the receiver
indicates an acknowledge bit by pulling the data line LOW
during the acknowledge clock pulse.
No−Acknowledge Bit
The no−acknowledge bit is generated when the data line
is not pulled down by the receiver during the acknowledge
clock pulse. A no−acknowledge bit is used to terminate
a read sequence.
Stop Bit
The stop bit is defined as a LOW−to−HIGH transition of
the data line while the clock line is HIGH.
Sequence
A typical READ or WRITE sequence begins by the
master sending a start bit. After the start bit, the master sends
the slave device’s 8−bit address. The last bit of the address
determines if the request is a read or a write, where a “0”
indicates a WRITE and a “1” indicates a READ. The slave
device acknowledges its address by sending an
acknowledge bit back to the master.
If the request was a WRITE, the master then transfers the
8−bit register address to which a WRITE should take place.
The slave sends an acknowledge bit to indicate that the
register address has been received. The master then transfers
the data 8 bits at a time, with the slave sending an
acknowledge bit after each 8 bits. The MT9V024 uses
16−bit data for its internal registers, thus requiring two 8−bit
transfers to write to one register. After 16 bits are transferred,
the register address is automatically incremented, so that the
next 16 bits are written to the next register address. The
master stops writing by sending a start or stop bit.
A typical READ sequence is executed as follows. First the
master sends the write mode slave address and 8−bit register
address, just as in the write request. The master then sends
a start bit and the read mode slave address. The master then